News updates

Execution day
For five-ish years we've been working towards this goal. To do a full trip around Rotholmen below the surface, while being able to celebrate this moment with friends and family.

Lost and found
The AUV Ålen was off on a mission, and we thought we had waved goodbye for the last time 👋
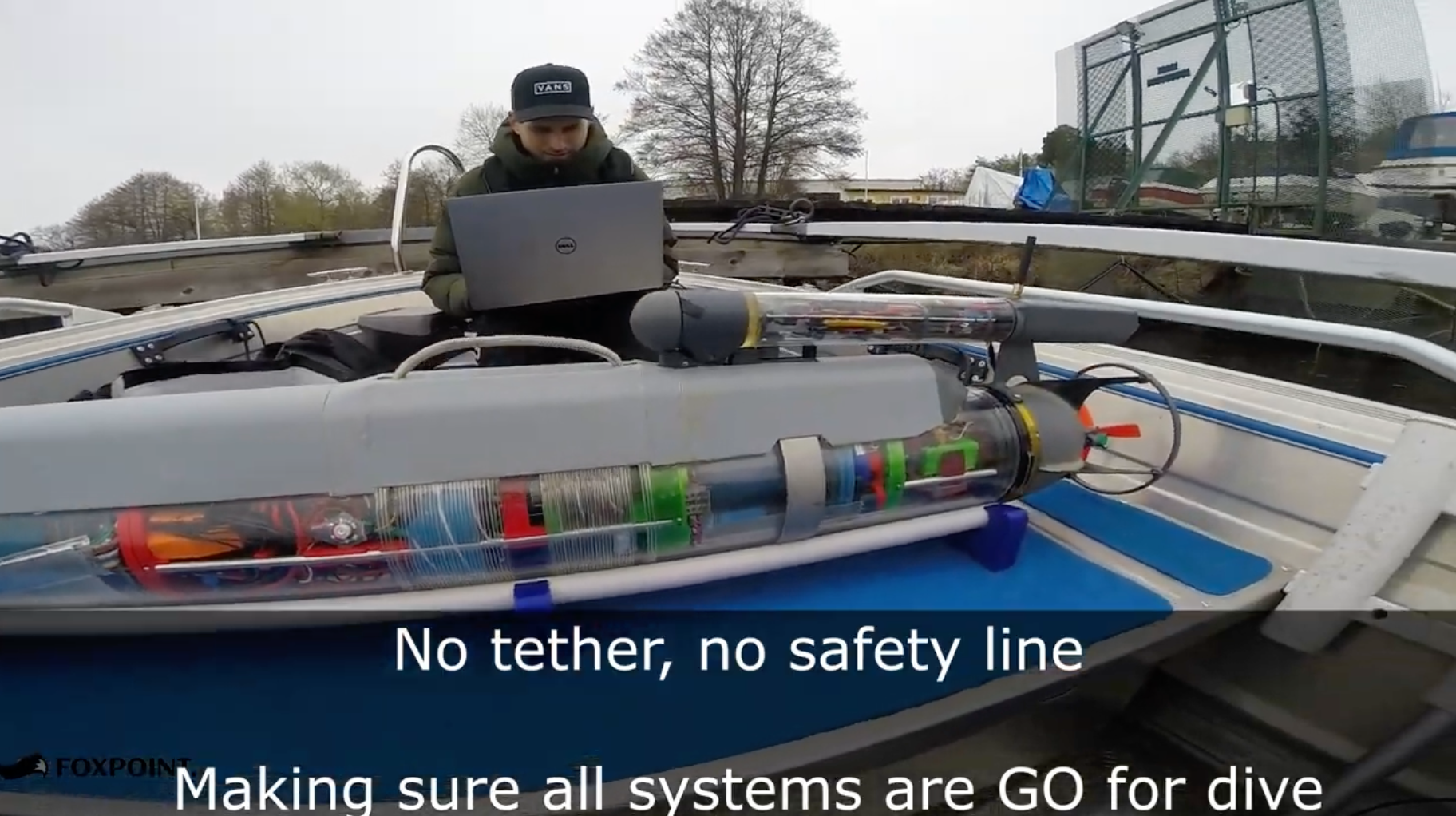
You're free!
First ever run on open water without tether or safety line for the AUV Ålen 😬 Check out the video to see how it went.

Tailgating the Eel
While testing in the field, we attached a camera to see what it would look like tailgating the Eel in the murky waters of Mälaren. And honestly, there's not much to see.
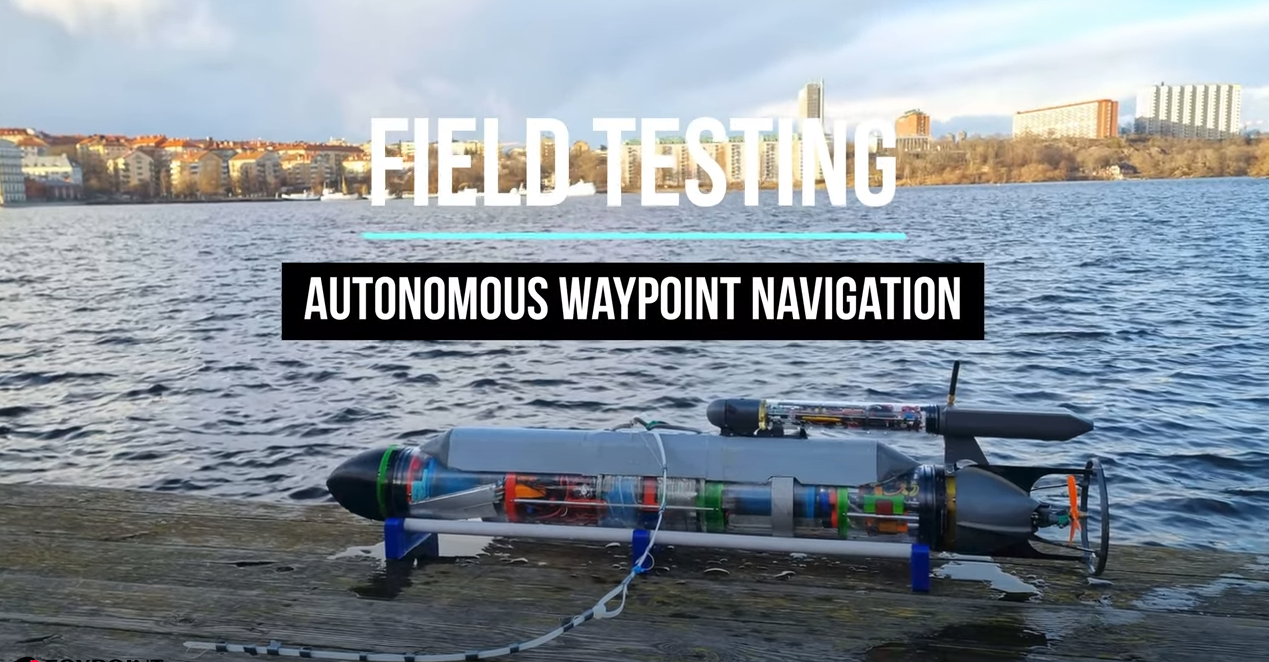
Closing in on the big voyage
Field test, trying out autonomous navigation under the surface.
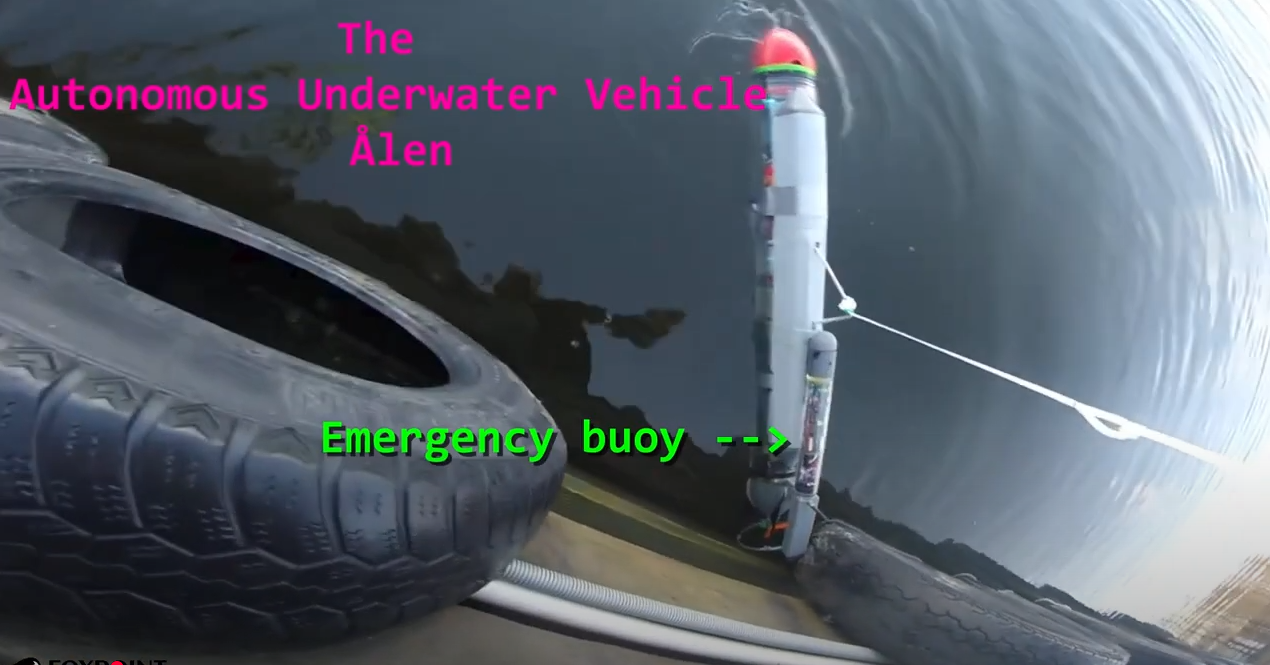
AUV Emergency Buoy field testing
Soon we will cut the tether to our AUV Ålen. If something happens during a mission, this system can (literally) become a lifeline.
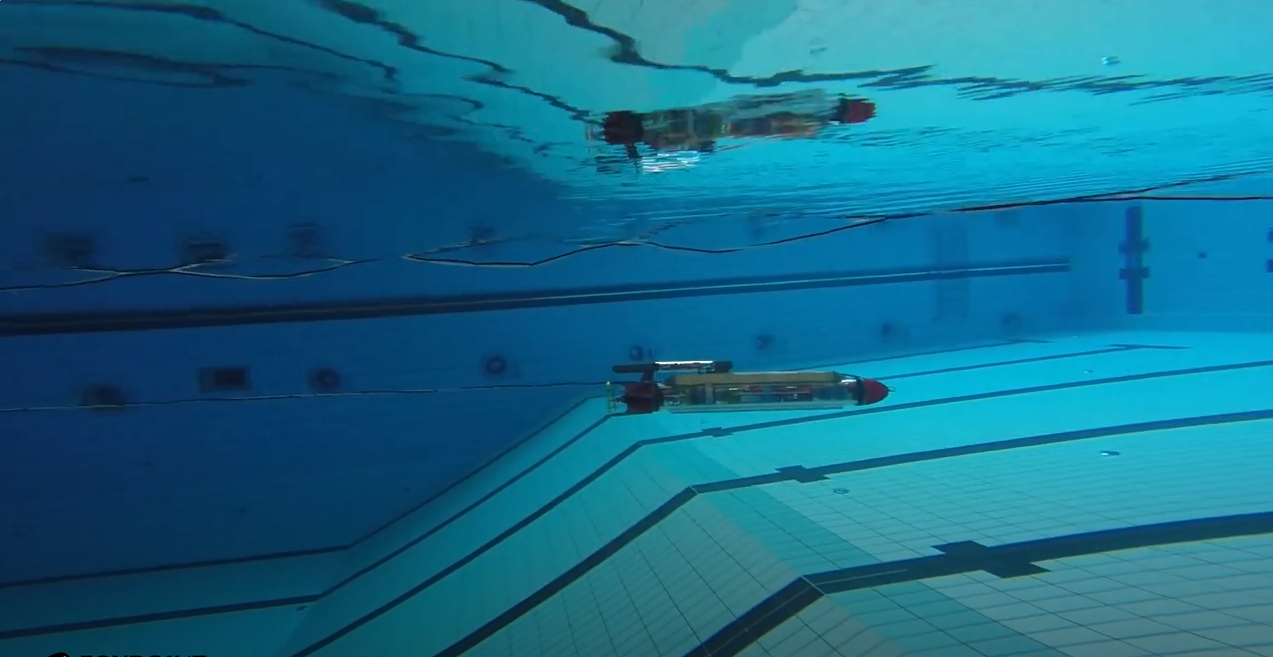
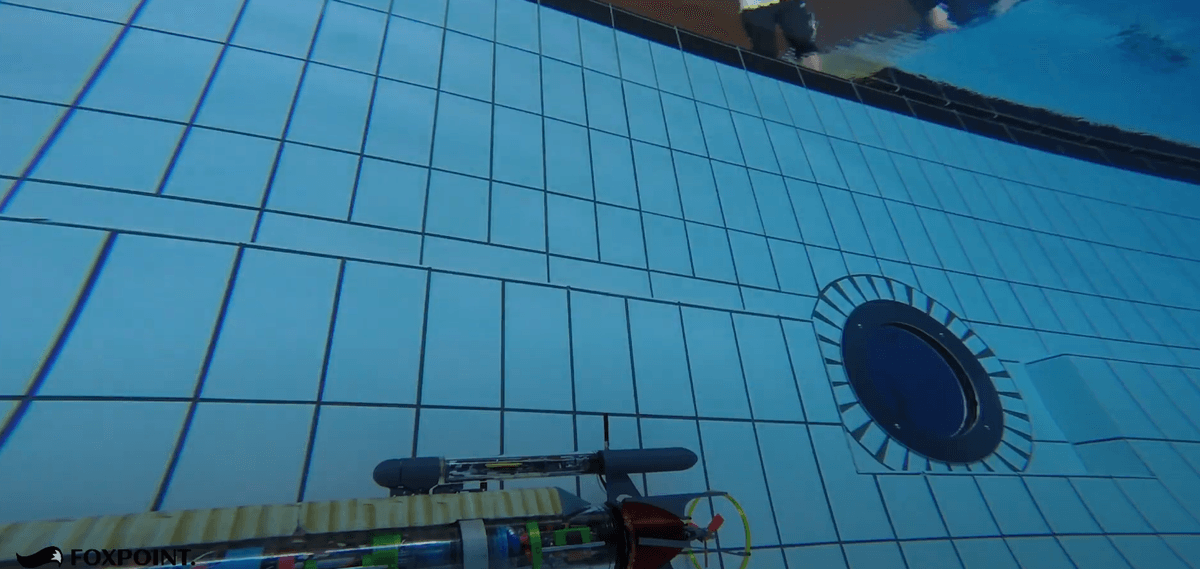
Successful test of depth control at GIH indoor pool
Looking at the telemetry data on the computer, we already knew that Ålen could go to, level out and hold a pre-determined depth in the murky waters of lake Trekanten. But seeing it do the same in a crystal-clear swimming pool is quite something else.
Demonstration of our emergency buoy
Outfitting the AUV Ålen with an emergency buoy for an upcoming non tethered autonomous mission. Here is some footage from us testing the system and a short explanation of how it works.